Untitled Document
Specifications
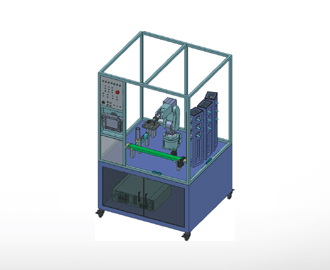
1. 6 axis vertical multi-joint robot system : 1SET
1) Assembly ROBOT
2) Assembly controller
3) Robot GRIPPER
- Type : Pnematic operation type
- Operation detection sensor : Attach type
- Operation range : 39mm or above
- Mass : 2Kg or below
- Operation : SPEED control
4) Protection device
- Base, Frame : Aluminum profile structure
- Door : Transparent acrylic 8t, Cover : Transparent acrylic 5t
- Hinges: Aluminum Sintered Alloy
- Lower part : infomax process, Wheel : Auto caster
- Door detecting sensor : 1 cell (Robot emergency function)
2. Tray To Tray
- Material : MC, Tray amount - 9 ea(3*3) : 1 ea
- Material supplier : Actuator - Tube cylinder (Φ16, S/T:75mm or above)
Cylinder sensor - 1 ea reed sensor
Material detection sensor - Optical fiber sensor
Provide material size - Φ39 * 25mm
Solenoid - 5-2way DC 24V
3. Conveyor
- Small conveyor : MOTOR - DC 24V geared motor
Product size - 42(W)*600(L) or above
TYPE - Belt type
- Inspection device: color sensor, proximity sensor
4. Storage
- TYPE : 3 row 3 level profil, Acrylic hybrid type
- Load Sensor: Inductive sensor 9ea